Scaling electric transport optimization with Google Cloud Run Jobs
· 9 min read

This blog post describes our journey scaling Einride’s transport optimization software using Google’s serverless high-performance computing platform, Cloud Run Jobs.
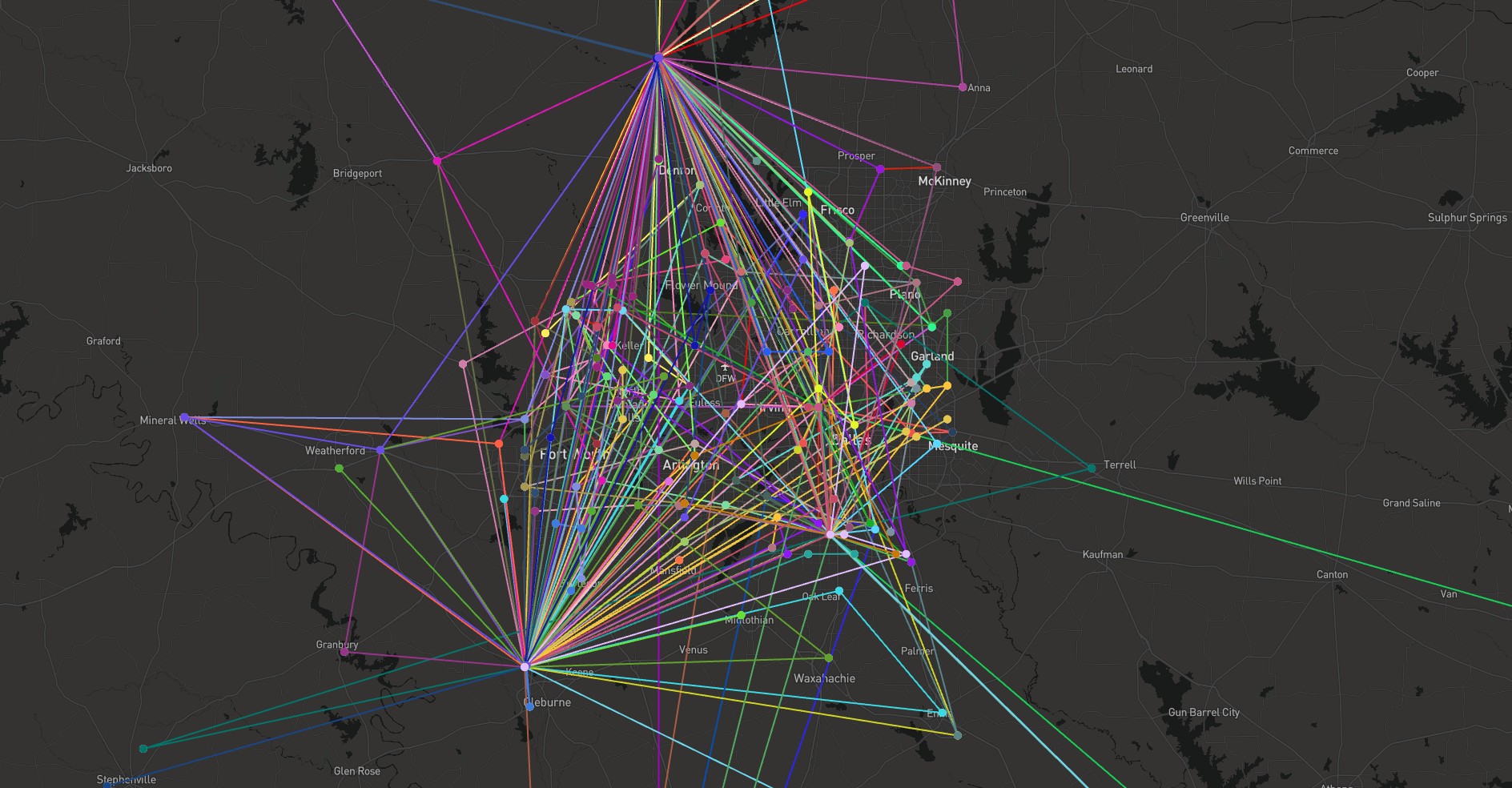
This blog post describes our journey scaling Einride’s transport optimization software using Google’s serverless high-performance computing platform, Cloud Run Jobs.