Efficiently Deploying Safe Autonomous Trucks: Einride's Approach

This blogpost describes how Einride have approached the enormous challenge of safely deploying cabless vehicles on public roads with a small team. It's touching on how we work with safety and find the right ODD through a data driven approach, then discussing the importance of finding the right thing to focus on and lastly a case study in how this all came together in what was the first driver less deployment of an autonomous truck on public roads in the US.

Deploying autonomous electric trucks safely on public roads is not just an engineering ambition; it's the cornerstone of transforming the future of freight. At Einride, this mission drives us to tackle the complexities of autonomous safety head-on. Success requires something beyond just engineering rigor; it demands a multi-faceted strategy built on an unwavering commitment to the highest safety standards, data-driven intelligence in choosing where and when to deploy, and shrewd decisions about what technology to build versus buy.
Navigating the Path to Deployment: US and EU Regulatory Landscapes
Deploying autonomous trucks safely and responsibly on public roads requires more than just technical excellence. It demands close coordination with regulators, a deep understanding of policy frameworks, and a strong commitment to public trust. At Einride, we believe that scalable deployment depends not only on how well the technology performs —but on how well it fits into the systems that govern public infrastructure.
Einride operates across all of these environments. As a company with roots in Europe’s rule-based regulatory culture, we’ve built our deployment model to align with existing legal frameworks—rather than waiting for perfect legislative clarity. This means adapting to different systems, working directly with public-sector institutions, and delivering safe operations without the need for special exceptions or carveouts.
In Sweden, Einride became the first to deploy an autonomous electric freight vehicle on public roads under the current framework. In the U.S., we coordinated with federal, state and local government to deploy our cabless fleet, supported by a human-in-the-loop approach and a comprehensive, rigorous safety case.
We’ve also been invited to participate in national autonomous vehicle freight trials in three EU countries, where governments are testing how autonomy can integrate with their transport and safety infrastructure. In the UK, we are collaborating with regulators to contribute to early discussions as part of the ASDE framework consultation. And in the United Arab Emirates, we’re in advanced discussions with Roads and Transport Authority (RTA) and DP World to support the country’s first autonomous freight pilot in Jebel Ali Port, aligned with national decarbonization and logistics goals.
To support this level of multi-jurisdictional alignment, we hold ourselves to a single, internal global standard—drawing on the most rigorous requirements across markets. This means constructing a safety case capable of meeting EU type-approval processes while also satisfying the evidence-driven expectations of U.S. regulators. Our safety case is developed using structured test methodologies and verified through independent review. In Sweden, for example, we collaborate with RISE (Research Institutes of Sweden) to conduct third-party safety validation and readiness assessments.
In an era where autonomous technologies are advancing quickly, Einride’s focus remains clear: early engagement with regulators to build systems that are safe, verifiable, and compatible with the public interest.
Finding the Right Path: Strategic ODD Selection Through Data
A cornerstone of safe autonomous vehicle deployment is the careful definition of the Operational Design Domain (ODD) – the specific operating conditions under which the autonomous system is designed to function safely. This includes factors like road types, weather conditions, lighting levels, traffic density, and specific geographical boundaries. While defining a theoretical ODD is essential, the real challenge lies in finding commercially viable routes and operations that match the capabilities of the technology at its current stage of maturity.
At Einride, our approach to ODD selection is intrinsically linked to our core offering: providing electric and autonomous freight solutions managed through our comprehensive digital platform. This platform doesn't just dispatch vehicles; it gathers vast amounts of operational data from our existing electric (manually driven) transport deployments with customers. We leverage this wealth of real-world logistics information – route characteristics, traffic patterns, loading/unloading zone specifics, typical weather – to proactively identify customer operations that align with ODDs suitable for safe autonomous deployment today. The work within this area is continuously evolving, allowing us to not only offer the best autonomous transport services, but also to have the most efficient way to identify suitable customer routes.
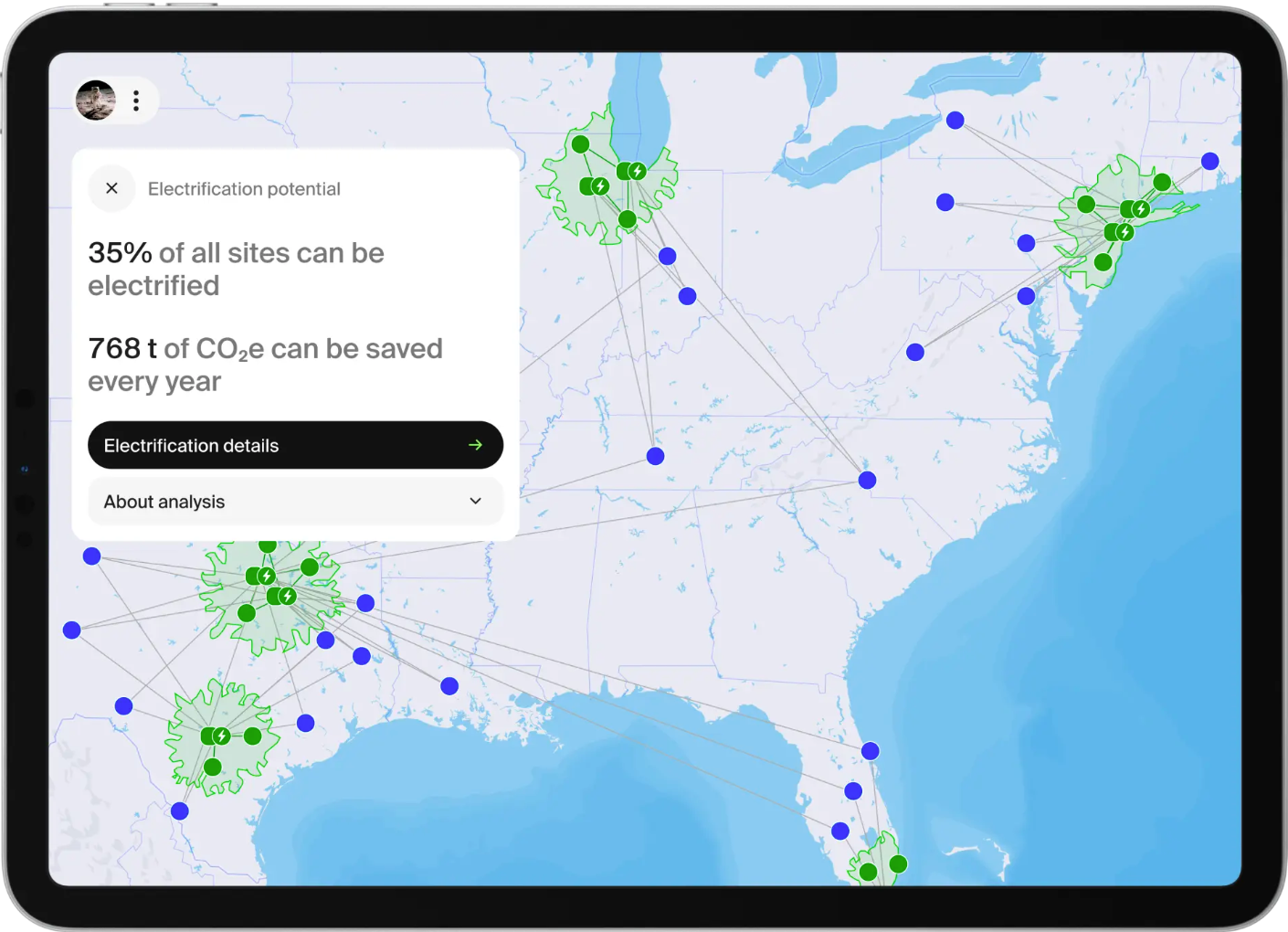
This strategy enables us to bridge the gap between development and real-world application much faster. By identifying and utilizing these carefully selected ODDs, we have been able to initiate fully autonomous operations, such as our groundbreaking work transporting goods for GE Appliances between their facilities in the US, and collaborating on forward-thinking logistics with partners like pharmacy e-retailer Apotea in Sweden – both proving the business case for daily autonomous operations generating customer value. These targeted deployments provide invaluable, real-world operational experience – product feedback loops, edge case encounters, and performance data – that simply cannot be replicated in simulation or on test tracks alone. It allows us to refine our technology, validate our safety case with empirical evidence, and build operational knowledge, effectively accelerating our path towards broader autonomous capabilities.
Strategic Focus: Mastering Complexity Through Prioritization
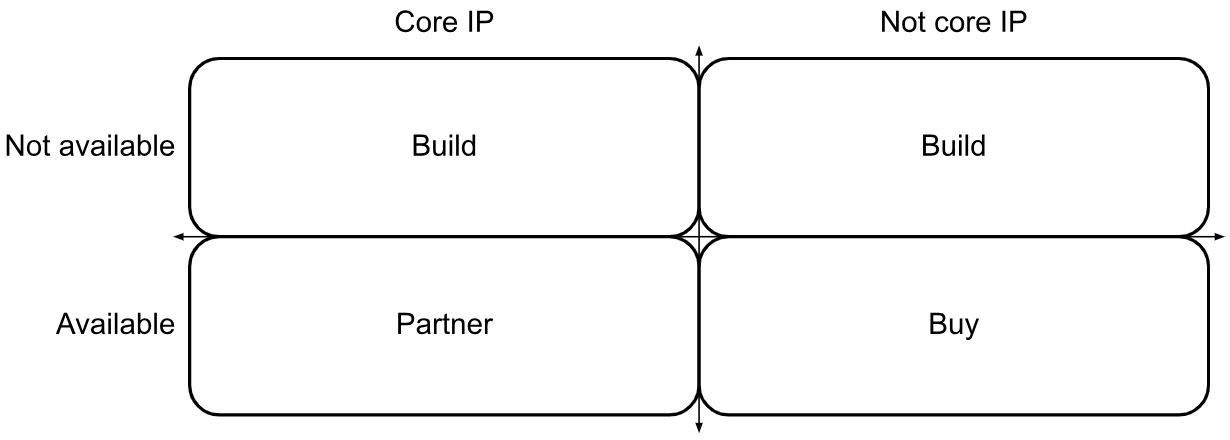
In any complex engineering endeavor, especially developing autonomous systems, focusing resources effectively is paramount. A key element of our strategy at Einride involves a hybrid approach of in-house technology development and leveraging partner capabilities. This framework helps us allocate resources effectively, focusing intensely on areas that are fundamental to our unique value proposition: delivering safe, reliable, and efficient autonomous electric freight.
Identifying Core Business Differentiators
Our guiding principle is to invest deeply in building the technologies that are core to the safety, intelligence, and performance of our system, or where suitable solutions simply don't exist on the market. Core Automated Driving System (ADS) elements like perception algorithms (how the vehicle sees and interprets the world) and motion planning (how the vehicle decides to navigate safely and efficiently) are developed entirely in-house. This gives us granular control over performance and behavior. This is also true for safety critical software directly responsible for emergency maneuvers and similar functions. These systems often have unique requirements tied to our specific vehicle platform and operational contexts. Another example of a self-developed system is the high-definition maps for navigation. That is developed in house since many of our customer operations occur on roads or sites not covered by existing maps.
Leveraging Industry Experts
Often, the optimal path involves a nuanced hybrid approach, combining internal expertise with partner capabilities. Our fail-operational steering system is a prime example. We identified the core intellectual property we wanted to own – the sophisticated logic for power and communication redundancies that guarantee safety – and developed it in-house. Simultaneously, we partnered with specialists for the development and production of the underlying dual electric motor actuator and classical control software. Similarly essential tools like simulation environments or real-time safety assessment software – as in the case study below – are sourced from specialized providers – accelerating our development.
Continuous Partnership Evaluation
Our strategic partnerships aren’t static. We continuously evaluate our technology partners and suppliers. The technology landscape evolves, as do our needs. Regularly assessing whether existing partnerships remain the optimal technical and strategic fit is crucial for sustained progress and ensuring we always work with the best available solutions, whether built or bought.
By deliberately choosing where to build, where to partner, and where to buy, we concentrate our engineering firepower on the challenges most critical to achieving safe and scalable autonomous transport, enabling a focused team to drive significant progress.
Case Study: Motion Planning and Trajectory Validation
The motion planner is the central decision making component of the autonomous vehicle. It is in the motion planner that the following data is bundled into a single problem:
- perception data such as objects, object class, and predicted object motion
- localization data such as ego pose, linear and rotational velocities, and accelerations in all three axis
- world data such as lane lines, traffic signs, speed limits and pedestrian crossings The problem is identifying the best trajectory to get to the destination. Our technology is solving this problem over 10 times per second to cope with changes in the environment, for example, if the car in front of our autonomous truck starts braking or if a pedestrian suddenly decides to cross the road. Solving this huge optimization problem is a challenge in itself and to prove that each output – each trajectory – is safe to follow becomes even harder.
The approach we took for this at Einride is inspired by the so-called “Doer and Checker” architecture. The doer is allowed to focus on solving the primary problem fast, and the checker is a component that focuses on checking the safety of the doer’s output.
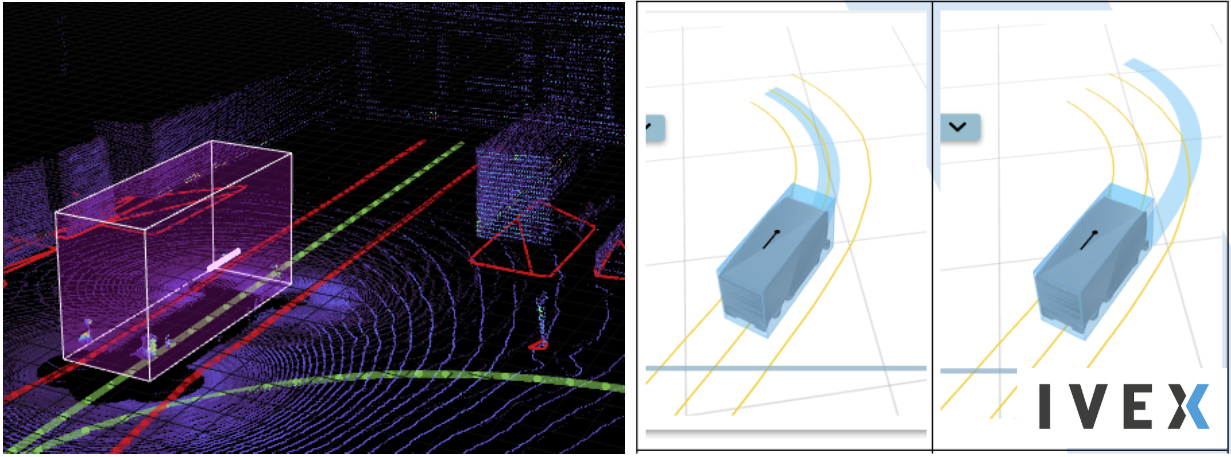
The output of the motion planner is the trajectory. The trajectory includes information such as all the positions, velocities, accelerations, steering angles and steering angle rates that the vehicle shall achieve over the upcoming horizon. A small error in the trajectory could lead the ego vehicle to end up in unwanted situations. That is why we need a Trajectory Checker that goes through the trajectory and makes sure that all the roughly 1600 values are correct and safe to follow. That’s 1600 values that are checked individually against 80 checks every 0.1s.
To meet this high performance rate, we partnered with IVEX, to leverage their Trajectory Checker to assure the safety of our motion planning. IVEX is a deep-tech software company specialized in data analytics, safety assessment, and on-road evaluation of ADAS/AD systems. Their software is used by Euro NCAP for testing and evaluating vehicle performance.

The approach we applied for this at Einride draws inspiration from the general principle of separation of concerns, similar in philosophy to the “Doer and Checker” concept, which emphasizes independent verification of actions. While ‘doer and checker’ is a patented method by Carnegie Mellon University, our technology implements an independent mechanism aligned with our methodology and specific application needs. The doer is allowed to focus on solving the primary problem fast, and the checker is a component that focuses on checking the safety of the doer’s output.
IVEX’s Trajectory Checker was one of the key building blocks in creating a safe, ADS-equipped, vehicle, enabling the world's first deployment of a heavy duty truck on public roads, without an onboard safety driver.
Summary
The journey toward autonomous electric freight is paved with complexity, but as we've outlined, achieving safe deployment is possible through strategic focus and diligent execution. Einride's approach hinges on several key pillars: establishing an uncompromising safety baseline by exceeding the highest regulatory expectations across key markets and engaging independent auditors like RISE; utilizing our unique digital platform data to intelligently select ODD, enabling real-world commercial operations sooner and gathering invaluable experience; and maintaining sharp focus through disciplined build-versus-buy decisions that concentrate our resources on core autonomous capabilities while leveraging specialized partners to deliver best-in-class solutions, like IVEX, for critical safety components such as the Trajectory Checker.
These elements are not pursued in isolation; they form an integrated strategy demonstrating that a dedicated, focused team can effectively tackle the immense challenge of autonomous safety. By combining rigorous engineering, adherence to stringent safety standards, smart and pragmatic deployment choices enabled by data, and strategic collaboration, we are not just developing technology – we are actively delivering safer, more efficient freight solutions. This focused methodology allows us to make significant strides, validating our safety case through real-world operation and paving the way for a sustainable autonomous future, one carefully selected route and rigorously verified system at a time.